|
PRODUCTS |
|
|
|
HELPFUL RESOURCES |
Site Guidelines
|
|
|
GStepD GStepH GStepM Desktop Applications |
Two Windows desktop applications are
under development ( GStepD and GStepH) to interface and control our GenY32,
GenX, GenX32 and GenZ Smart Motion Control products. Both products are
in alpha test and will be released soon.
GStepM is an experimental
multi-hexapod controller/simulator allowing the interaction of multiple
hexapods to be modeled and motion executed in real time.
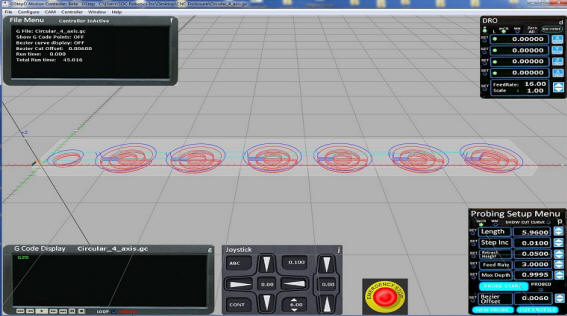
GStepD
GStepD controls/simulates the operation of standard mills and lathe up to six axis.
The application runs on Windows platforms and supports full MFC operation
with multiple Windows that can resized, floated, hidden and re-positioned.
GStepD includes a built-in CAM function for converting CAD files to G Code.
Multiple controllers (MK4FQ, GenY32, PiMotion, PaellaM and PicoS) are
supported including GStep, grbl and tinyg.
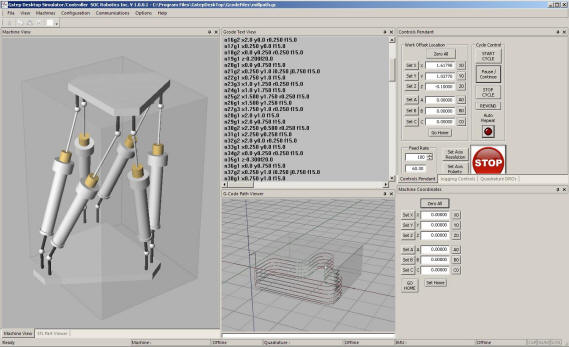
GStepH
GStepH controls/simulates a rotary or linear hexapod. The application
converts standard G Code entered as X, Y, Z, A, B and C moves into the
appropriate moves to position the top platform. X, Y Z are
translations while A,B and C are roll, pitch and yaw respectively.
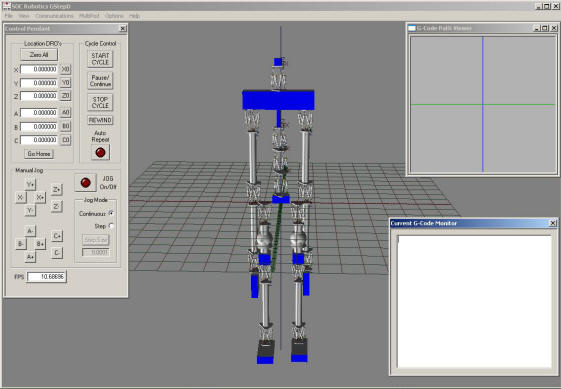
GStepM - Multipod
Multipod is a multiple hexapod control/simulation tool that models the operation of multiple
connected hexapods. Hexapod connections are created by the user and
motion trajectories are entered either as individual G Code files attached
to each hexapod or as a bvh motion capture file. The bvh file mode
also defines the topology of the hexapod connections. The final motion
of all hexapods are modeled in real time. The controller also has the
ability to send G Code files to multiple external real hexapods while the
simulation is running.
|
